
As an automotive technician specializing in electric vehicles, I have observed the rapid evolution of新能源汽车 and their core electrical control systems. These systems are pivotal for ensuring vehicle safety, efficiency, and reliability. In this article, I will delve into the composition of EV electrical control systems, explore various fault diagnosis methods, and discuss effective maintenance strategies. The focus will be on practical approaches that enhance EV repair and electrical car repair processes, supported by data analysis, simulations, and real-world applications. With the growing adoption of electric vehicles, mastering these aspects is crucial for reducing downtime and costs in electrical car repair.
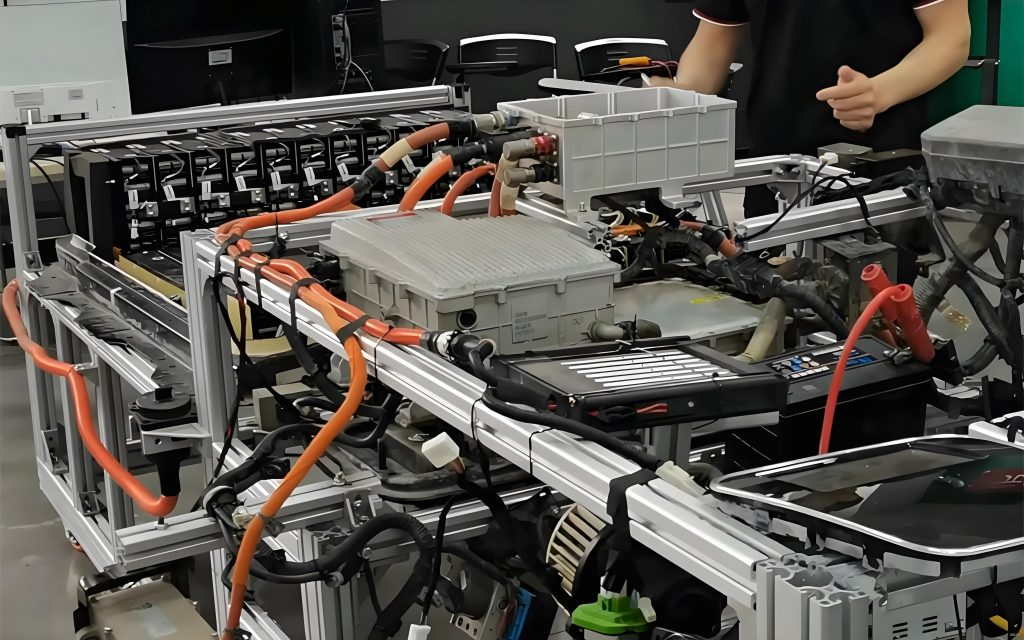
The electrical control system in an EV acts as the central nervous system, integrating components like the battery, motor, and power electronics. It comprises hardware and software elements that work in tandem to manage energy flow, monitor performance, and execute control commands. From my experience in EV repair, understanding this composition is the first step toward effective fault diagnosis. Key hardware components include microcontrollers (MCUs), sensors, actuators, and power converters such as the onboard charger, DC/DC converter, battery management system (BMS), motor control unit (MCU), and vehicle control unit (VCU). Software aspects involve operating systems and algorithms that process data and optimize operations. For instance, the BMS assesses battery health using parameters like voltage and temperature, which are critical in electrical car repair scenarios. To summarize the components, consider Table 1 below.
| Component | Function | Common Issues in EV Repair |
|---|---|---|
| Battery Management System (BMS) | Monitors battery state, manages charging/discharging, and ensures safety. | Voltage imbalances, thermal runaway, sensor failures. |
| Motor Control Unit (MCU) | Regulates motor torque and speed based on driver inputs. | Insulation breakdown, inverter faults, signal errors. |
| Vehicle Control Unit (VCU) | Coordinates subsystems for optimal energy management and vehicle dynamics. | Software bugs, communication failures, power supply issues. |
| Onboard Charger | Converts AC to DC for battery charging and provides protection. | Overheating, component wear, connectivity problems. |
| DC/DC Converter | Steps down high voltage to 12V for auxiliary systems. | Efficiency loss, voltage spikes, circuit faults. |
In my work with EV repair, I rely on multiple fault diagnosis methods to identify and resolve issues efficiently. One common approach is fault code-based diagnosis, where diagnostic tools read stored codes from controllers like the BMS or MCU. For example, a fault code indicating “battery over-voltage” can quickly point to a specific problem, but it may not capture intermittent issues. This method is fast but limited, as it often requires supplementary data for comprehensive electrical car repair. To illustrate, the relationship between fault codes and potential causes can be modeled probabilistically. Let the probability of a fault given a code be represented as $$ P(F|C) = \frac{P(C|F) \cdot P(F)}{P(C)} $$ where \( P(F|C) \) is the probability of fault \( F \) given code \( C \), \( P(C|F) \) is the likelihood of the code under that fault, and \( P(F) \) is the prior probability of the fault. This Bayesian approach helps in refining diagnoses during EV repair.
Another method I frequently use is data analysis-driven diagnosis, which leverages big data and machine learning. With the abundance of sensors in modern EVs, parameters such as current, temperature, and转速 can be collected via CAN bus. After preprocessing—including data cleaning and feature extraction—I apply techniques like correlation analysis to identify anomalies. For instance, a drop in battery efficiency might correlate with temperature fluctuations, indicating a need for proactive electrical car repair. A simple linear regression model can predict system health: $$ y = \beta_0 + \beta_1 x_1 + \beta_2 x_2 + \epsilon $$ where \( y \) represents a health metric, \( x_1 \) and \( x_2 \) are sensor readings, \( \beta \) coefficients are learned from data, and \( \epsilon \) is the error term. This data-centric approach not only aids in fault detection but also in predicting剩余寿命, which is vital for scheduling EV repair activities. Table 2 compares different data analysis techniques used in electrical car repair.
| Technique | Application in EV Repair | Advantages | Limitations |
|---|---|---|---|
| Correlation Analysis | Identifies relationships between variables, e.g., temperature and battery voltage. | Simple to implement, quick insights. | May miss nonlinear dependencies. |
| Regression Models | Predicts system parameters like State of Health (SOH). | Provides quantitative forecasts. | Requires large datasets for accuracy. |
| Time Series Analysis | Monitors trends over time for early fault detection. | Captures temporal patterns. | Sensitive to noise and outliers. |
| Machine Learning (e.g., SVM, Neural Networks) | Classifies fault types based on historical data. | High accuracy, handles complex patterns. | Computationally intensive, needs labeled data. |
Simulation-based diagnosis is another powerful tool in my EV repair toolkit. By building digital twins of the electrical control system, I can replicate faults and study their propagation without physical disassembly. For example, using software like MATLAB/Simulink, I model components such as the motor and controller, injecting faults like insulation degradation or sensor bias. The simulation outputs, such as current waveforms or temperature profiles, are compared to real-world data to pinpoint issues. A fundamental equation in these models is the differential equation for battery dynamics: $$ \frac{dV}{dt} = -\frac{1}{RC} V + \frac{I}{C} $$ where \( V \) is voltage, \( I \) is current, \( R \) is resistance, and \( C \) is capacitance. This allows me to simulate scenarios like a short circuit and observe the effects, facilitating accurate diagnoses in electrical car repair. Moreover, simulation helps in training technicians for complex EV repair tasks by providing a risk-free environment.
When it comes to maintenance strategies, I advocate for a proactive approach centered on preventive maintenance. Instead of waiting for failures, I use real-time sensor data to assess component health and predict when intervention is needed. For instance, by monitoring the State of Charge (SOC) and State of Health (SOH) of batteries, I can schedule replacements before catastrophic failures occur. The SOH is often calculated as $$ \text{SOH} = \frac{C_{\text{actual}}}{C_{\text{nominal}}} \times 100\% $$ where \( C_{\text{actual}} \) is the current capacity and \( C_{\text{nominal}} \) is the original capacity. This strategy minimizes unexpected breakdowns and optimizes the lifecycle of components, making electrical car repair more efficient and cost-effective. In practice, I differentiate between “sub-health” and “faulty” states, applying tailored measures such as parameter adjustments or software updates to delay degradation.
Modular replacement is a key strategy I employ to streamline EV repair processes. By designing the electrical control system as interchangeable modules, I can quickly swap out faulty units—like a defective BMS or MCU—without replacing the entire system. This reduces downtime and simplifies diagnostics. For example, if a motor controller fails, I follow standardized procedures to isolate and replace it, leveraging modular interfaces. This approach not only speeds up electrical car repair but also lowers costs, as modules can be refurbished or recycled. Table 3 outlines the benefits and considerations of modular replacement in EV repair.
| Aspect | Description | Impact on EV Repair |
|---|---|---|
| Functional Independence | Modules operate autonomously, easing isolation of faults. | Reduces diagnostic time and complexity. |
| Standardized Interfaces | Plug-and-play connections between modules. | Facilitates quick swaps and interoperability. |
| Cost Efficiency | Targeted replacement of modules instead of full systems. | Lowers parts and labor costs in electrical car repair. |
| Scalability | Easy integration of upgrades or new technologies. | Future-proofs vehicles and repair processes. |
Remote diagnosis and repair have revolutionized how I handle EV repair tasks. Through telematics and IoT, I can access vehicle data in real-time, perform analyses from a distance, and even execute fixes via over-the-air (OTA) updates. For instance, if a VCU software bug causes erratic behavior, I can push an update to recalibrate parameters without physical intervention. This not only enhances response times but also allows for continuous monitoring across fleets. In one case, I used remote data to identify a pattern of battery overheating in multiple vehicles, enabling preemptive electrical car repair before widespread failures occurred. The efficiency of remote methods can be quantified using metrics like mean time to repair (MTTR): $$ \text{MTTR} = \frac{\sum \text{Repair Time}}{\text{Number of Repairs}} $$ which often decreases with remote capabilities, improving overall service quality in EV repair.
In conclusion, the integration of advanced diagnosis and maintenance strategies is essential for the future of EV repair and electrical car repair. As EVs become more complex, techniques like data analytics, simulations, and modular approaches will play a crucial role in ensuring reliability and affordability. From my perspective, embracing these methods not only addresses current challenges but also paves the way for innovations in electric mobility. By focusing on proactive and intelligent systems, we can build a robust framework that supports sustainable transportation and enhances the overall experience of electrical car repair.