
As the automotive industry rapidly advances, automotive electronic control technology has become one of the core technologies in modern vehicles. Integrating knowledge from electronic engineering, computer control, and automotive construction, this field encompasses key areas such as engine control, automatic transmission control, chassis control, and body electronics. It involves sensor technology, control logic of the motor control unit, CAN bus communication, fault diagnosis systems, and more, playing a crucial role in enhancing vehicle performance, safety, comfort, and environmental friendliness. Therefore, the foundational course in automotive electronic control technology holds an extremely important position in automotive engineering education. However, due to its abstract theories, fast-paced technological updates, and strong practical demands, traditional teaching methods often fail to achieve ideal educational outcomes. In this article, I will delve into an exploration of teaching methodologies for this course, aiming to provide valuable insights for its reform and improvement.
From my teaching experience, I have identified several critical issues in traditional approaches that hinder effective learning. First, there is a significant gap between theory and practice. Concepts like sensor working principles and control strategy algorithms are inherently abstract, lacking tangible representation, which makes them difficult for students to grasp. For instance, understanding how a motor control unit processes inputs from various sensors requires a concrete visualization of signal flow and decision-making processes. Traditional lectures often overwhelm students with theoretical content without adequate hands-on opportunities, leading to disengagement. Statistics from my observations show that only about 32% of students can independently complete circuit analysis tasks, and issues such as expensive, easily damaged lab equipment (e.g., ECU chip programming error rates up to 15%) and insufficient industry-academia collaboration (with enterprises reporting that less than 50% of graduates meet debugging skill standards) exacerbate this problem. This disconnection not only dampens student interest but also prevents them from mastering real-world applications of automotive electronic control.
Second, the content in automotive electronic control courses often lags behind technological advancements. With the widespread adoption of vehicle connectivity, intelligence, and electrification, new technologies and components emerge constantly. However, textbooks and case studies are frequently outdated, failing to reflect the latest developments. This creates a mismatch between what students learn and industry demands, making it challenging for graduates to adapt to the fast-evolving automotive sector. For example, while modern vehicles incorporate advanced motor control units for hybrid or electric powertrains, many courses still focus on legacy systems, leaving students unprepared for contemporary challenges.
Third, teaching methods tend to be monotonous and teacher-centered. The prevalent “lecture-based” approach, where instructors passively disseminate knowledge, lacks interactivity and engagement. Students become passive recipients, which stifles their initiative and innovative thinking. This method can lead to cognitive rigidity, where students struggle to extend their logical reasoning, resulting in rapid knowledge decay—often forgetting up to 70% of material shortly after learning it. Such an environment hinders the development of critical skills needed for automotive electronic control, such as problem-solving and adaptive learning.
Fourth, assessment systems are overly simplistic. Traditionally, course evaluation relies heavily on final written exams and minor components like homework, attendance, and classroom performance. This approach is flawed: homework often suffers from plagiarism, making it unreliable for gauging understanding; teachers, burdened with heavy workloads, cannot meticulously observe each student’s in-class contributions; and written tests fail to assess practical abilities like fault diagnosis or system debugging. This one-dimensional evaluation lacks scientific rigor, impeding a comprehensive understanding of student progress and hindering instructional adjustments.
To address these challenges, I have explored and implemented several innovative teaching methods that emphasize active learning, practical integration, and holistic assessment. These strategies aim to bridge the theory-practice divide, update content dynamically, diversify pedagogy, and refine evaluation—all while repeatedly emphasizing the centrality of the motor control unit in automotive systems.
Constructing a Dual Spiral Knowledge System with Virtual and Physical Elements
A key innovation involves building an integrated knowledge system that combines virtual simulations with physical experiments. The “virtual” aspect leverages digital tools to create interactive models, such as developing ECU control model libraries in MATLAB/Simulink or establishing digital twin platforms for automotive electronic control systems. These simulations allow students to visualize complex processes, like closed-loop control in a motor control unit, through virtual oxygen sensor signal emulations. The “physical” aspect utilizes hands-on lab equipment, such as modular electronic control test benches that support switching between systems like ABS, ESP, and EMS, and portable automotive electronic diagnostic toolkits containing oscilloscopes, diagnostic scanners, and programmers. For instance, I design “black-box experiments” where students are given only fault symptoms and must devise their own diagnostic plans. This dual approach fosters deeper knowledge accumulation by alternating between abstract concepts and tangible experiences.
To illustrate the virtual component, consider the mathematical modeling of a motor control unit’s operation. The control algorithm for engine management can be represented using formulas that describe sensor inputs and actuator outputs. For example, the relationship between throttle position and fuel injection might be modeled as:
$$F_i = k \cdot \int (TPS – \theta) \, dt + C$$
where \(F_i\) is the fuel injection rate, \(k\) is a control gain, \(TPS\) is the throttle position sensor signal, \(\theta\) is a reference angle, and \(C\) is a calibration constant. Such equations help students understand how the motor control unit processes real-time data. In physical labs, students can validate these models by measuring actual sensor signals and adjusting parameters, reinforcing the link between theory and practice.
| Aspect | Virtual Tools | Physical Tools | Learning Outcomes |
|---|---|---|---|
| Control Simulation | MATLAB/Simulink models | ECU programming devices | Understand algorithm design for motor control unit |
| Fault Diagnosis | Digital twin of CAN bus | Portable diagnostic scanners | Develop troubleshooting skills |
| System Integration | Virtual sensor networks | Modular test benches | Grasp interconnections in electronic control |
This table summarizes the dual spiral approach, highlighting how virtual and physical elements complement each other to enhance comprehension of the motor control unit and related systems.
Project-Driven Learning Methodology
Project-driven learning shifts the focus from passive instruction to active, student-centered exploration. In this method, I design course content around real-world projects that mirror actual automotive electronic control scenarios. Each project centers on a specific system, such as diagnosing and repairing engine electronic control systems, testing automatic transmission controls, or resolving CAN bus communication faults in vehicle bodies. Students engage in all stages—from system design and hardware selection to software programming—applying theoretical knowledge to practical tasks. This not only deepens their understanding but also boosts interest and cultivates innovative thinking.
For example, a project might involve optimizing the performance of a motor control unit in a hybrid vehicle. Students would need to analyze sensor data, adjust control parameters, and validate changes through simulation and physical testing. The process encourages teamwork and problem-solving, as students collaborate to overcome challenges. To quantify learning outcomes, I often incorporate performance metrics, such as the efficiency improvement of the motor control unit, calculated as:
$$\eta = \frac{P_{out}}{P_{in}} \times 100\%$$
where \(\eta\) is efficiency, \(P_{out}\) is the output power from the motor control unit, and \(P_{in}\) is the input power. Through such projects, students see direct applications of concepts, making the motor control unit’s role more tangible and relevant.
| Project Type | Key Tasks | Skills Developed | Role of Motor Control Unit |
|---|---|---|---|
| Engine Control Tuning | Calibrate fuel injection maps | Data analysis, programming | Core processor for engine management |
| CAN Bus Debugging | Identify network faults | Systemic thinking, communication | Integrates with other ECUs via bus |
| Hybrid System Design | Optimize energy distribution | Innovation, integration | Coordinates between engine and electric motor |
This table outlines sample projects, emphasizing how each involves the motor control unit and fosters diverse competencies.
Enhancing Practical Teaching Through Staged Implementation
Practical teaching is strengthened via a three-phase approach: foundational training, system integration, and innovative practice. In the foundational phase, students engage in basic exercises like constructing modular circuits for sensor signal acquisition (e.g., throttle position sensor circuits). The integration phase involves real-vehicle fault diagnosis, such as troubleshooting CAN bus issues in a比亚迪秦 hybrid system—though I avoid brand specifics to maintain generality. The innovation phase encourages participation in competitions like national intelligent vehicle contests, where students develop electronic control systems from scratch. This progression ensures a gradual build-up of skills, from simple tasks to complex applications.
Additionally, I arrange internships at automotive repair shops or intensive sessions in campus training centers, exposing students to actual motor control unit failures and repair techniques. This hands-on experience bridges classroom learning with industry practices, enhancing vocational readiness. For instance, students might use oscilloscopes to capture signals from a motor control unit during operation, analyzing waveforms to identify anomalies. The practical aspect can be summarized with formulas for signal processing, such as calculating the frequency response of a sensor:
$$H(f) = \frac{V_{out}(f)}{V_{in}(f)}$$
where \(H(f)\) is the transfer function, and \(V_{out}\) and \(V_{in}\) are output and input voltages at frequency \(f\). By applying this in labs, students gain insight into how the motor control unit interprets sensor data.
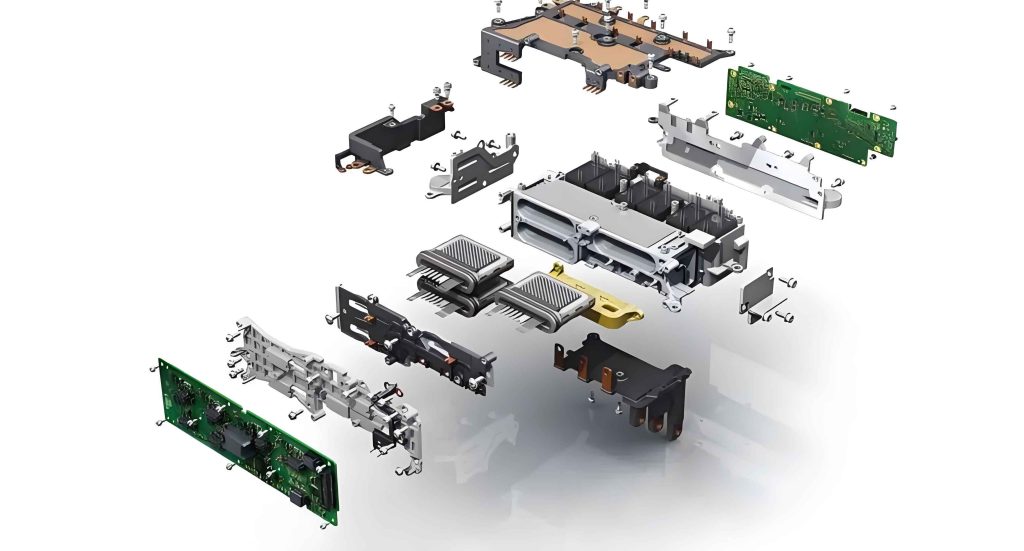
The image above illustrates a typical motor control unit setup, highlighting its components and connections—a visual aid that reinforces practical lessons. In my teaching, I use such visuals to discuss the unit’s architecture, emphasizing its importance in automotive electronic control systems.
Reforming the Assessment System for Comprehensive Evaluation
To move beyond traditional exams, I have developed a multi-layered evaluation framework covering four dimensions: knowledge comprehension, skill operation, systemic thinking, and innovative application. This system assesses not just memorization but also analytical abilities, practical proficiency, and creativity. It includes three main components: process-based assessments, practical操作 evaluations, and comprehensive challenges.
Process-based assessments leverage technology, such as natural language processing (NLP) to analyze lab reports, extracting key parameters to gauge students’ thought processes and knowledge application. For example, reports on motor control unit calibration might be evaluated for clarity in explaining control logic. Practical evaluations involve group tasks in lab settings, where students perform operations like circuit wiring or fault diagnosis, testing their hands-on skills and teamwork. Comprehensive assessments include events like innovation design competitions for automotive electronic control systems, judged with industry experts, to foster creative thinking.
Mathematically, I sometimes use scoring rubrics that weight different aspects. For instance, the overall grade \(G\) might be calculated as:
$$G = 0.3 \cdot K + 0.3 \cdot S + 0.2 \cdot T + 0.2 \cdot I$$
where \(K\) represents knowledge scores from written tests, \(S\) is skill performance from practicals, \(T\) is systemic thinking from project reports, and \(I\) is innovation from competition entries. This formula ensures a balanced evaluation, repeatedly referencing the motor control unit’s role in each component.
| Evaluation Type | Methods | Focus Areas | Motor Control Unit Relevance |
|---|---|---|---|
| Process-Based | NLP analysis of reports | Understanding of control algorithms | Core theories applied to unit operation |
| Practical操作 | Lab tasks (e.g., debugging) | Hands-on skills, teamwork | Direct interaction with physical units |
| Comprehensive | Innovation competitions | Creativity, real-world application | Designing or optimizing unit functions |
This table details the reformed assessment system, showing how each part ties back to the motor control unit and broader electronic control principles.
Implementation Outcomes and Reflective Insights
Adopting these innovative methods has yielded positive results in my courses. Student attendance has improved significantly, with heightened interest and engagement. Practical abilities, especially in fault diagnosis involving the motor control unit, have shown marked advancement. Teamwork and innovative thinking have been nurtured through project collaborations. Based on surveys and grade analyses, course satisfaction reaches around 90%, with notable increases in pass rates and excellence. For instance, students now better understand how the motor control unit integrates with sensors and actuators, as evidenced by their ability to troubleshoot complex systems independently.
Quantitatively, pre- and post-implementation data can be compared using statistical measures. If \(X\) represents student performance scores before reforms and \(Y\) after, the improvement \(\Delta\) can be expressed as:
$$\Delta = \frac{\bar{Y} – \bar{X}}{\sigma_X} \times 100\%$$
where \(\bar{X}\) and \(\bar{Y}\) are mean scores, and \(\sigma_X\) is the standard deviation of pre-reform scores. In my experience, \(\Delta\) often exceeds 20%, indicating substantial gains. This progress underscores the effectiveness of methods that repeatedly emphasize the motor control unit’s functionality.
Concluding Remarks and Future Directions
The foundational course in automotive electronic control technology is vital for training professionals in the automotive sector. Traditional teaching approaches, with their limitations in theory-practice integration, content currency, methodological diversity, and assessment breadth, often fall short. Through exploring and applying innovative strategies—such as the dual spiral knowledge system, project-driven learning, enhanced practical teaching, and a reformed evaluation framework—I have observed significant improvements in student learning outcomes. These methods foster a deeper engagement with key concepts, particularly the motor control unit, while developing critical skills like collaboration and innovation.
Looking ahead, I plan to further refine these approaches by incorporating emerging technologies like AI-driven simulations for motor control unit testing or virtual reality for immersive lab experiences. Continuous feedback from students and industry will guide adjustments, ensuring the course remains aligned with automotive advancements. Ultimately, by flexibly adapting pedagogy to course content and student needs, we can enhance teaching quality and cultivate high-caliber talent for the automotive electronic control field. The motor control unit, as a central element, will continue to be a focal point in this educational journey, driving both theoretical understanding and practical mastery.
In summary, this exploration highlights the transformative potential of innovative teaching in automotive electronic control education. By bridging gaps with hands-on experiences, updated content, interactive methods, and holistic assessments, we can empower students to thrive in a dynamic industry. The motor control unit serves as a recurring theme throughout, symbolizing the integration of electronics and mechanics that defines modern vehicles. As educators, our role is to demystify such complexities through creative instruction, paving the way for the next generation of automotive engineers.