
The evolution of the automotive industry is unequivocally steering towards a convergence of two transformative technologies: electrification and automation. My research and observations within this field have led me to a compelling conclusion: the electric drive system is not merely a complementary technology for autonomous vehicles (AVs) but a foundational enabler that offers profound technical advantages. The inherent characteristics of electric propulsion align seamlessly with the stringent requirements of safe, precise, and efficient self-driving operation. This article, from my perspective as a researcher engaged in this domain, delves into the technical fabric of electric drive systems, dissecting their control paradigms, dynamic performance, and intrinsic suitability for the world of autonomous driving.
At its core, the shift towards an electric drive system is driven by macro-level imperatives—sustainability, energy security, and urban air quality. However, when viewed through the lens of autonomous vehicle development, the rationale becomes intensely technical. An autonomous vehicle is essentially a mobile supercomputer, a complex cyber-physical system that must perceive, plan, and act with sub-second latency and high reliability. The traditional internal combustion engine (ICE) powertrain, with its mechanical inertia, slow throttle response, and complex multi-gear transmission, presents inherent bottlenecks for high-fidelity vehicle motion control. In contrast, an electric drive system, typically centered on a high-performance motor like the Permanent Magnet Synchronous Motor (PMSM), offers a direct, fast, and software-defined interface between the autonomous driving computer’s commands and the vehicle’s physical motion.
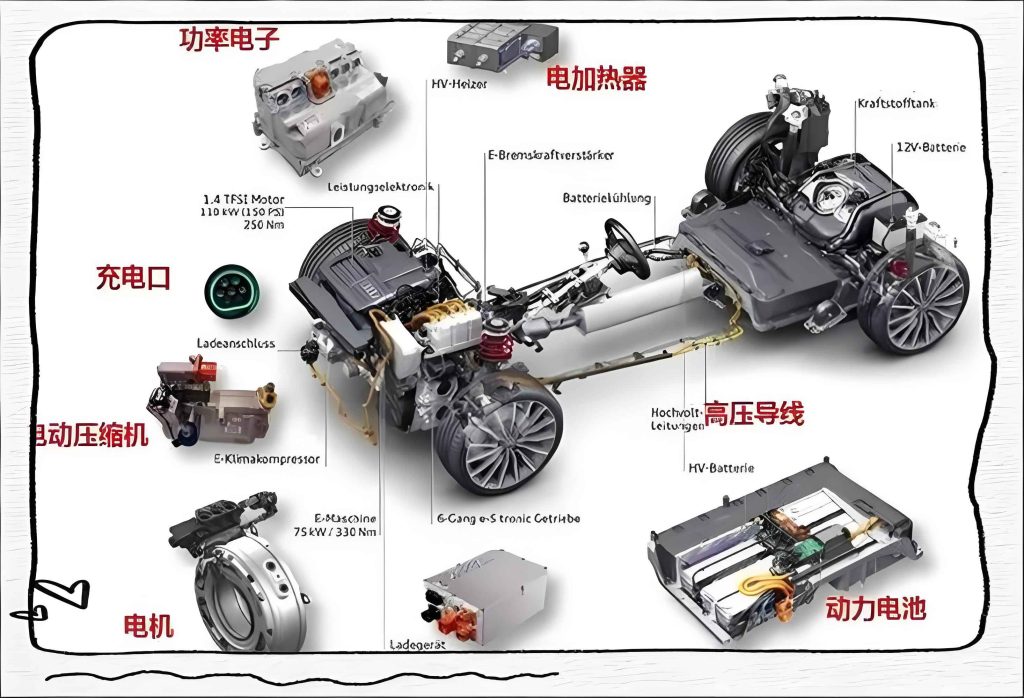
The advantages of adopting an electric drive system for autonomy are multifaceted. Firstly, it provides superior energy integration. An AV’s sensor suite (LiDAR, radar, cameras), computing platform, and communication modules constitute a significant continuous electrical load, often exceeding a kilowatt. The high-voltage battery and power distribution network in an electric vehicle readily supply this demand, whereas a conventional 12V system would be severely strained. Secondly, the packaging benefits are substantial. The compact nature of electric motors, single-speed reducers, and flat battery packs liberates interior and crumple-zone space. This space is critical for housing the autonomous system’s hardware without compromising passenger comfort or safety ratings. Thirdly, and most crucially, is the domain of motion control performance: torque response time, precision, and bandwidth. The electric drive system excels here, enabling the precise execution of the trajectory-following commands generated by the path planner.
The heart of this performance lies in the motor and its control strategy. The PMSM has become the workhorse of modern electric traction due to its high power density, efficiency, and controllability. My work involves extensive modeling and simulation of these systems to quantify their capabilities. The mathematical model of a PMSM in the rotating (d-q) reference frame is fundamental. The voltage equations are:
$$
u_d = R_s i_d + L_d \frac{di_d}{dt} – \omega_e L_q i_q
$$
$$
u_q = R_s i_q + L_q \frac{di_q}{dt} + \omega_e (L_d i_d + \psi_f)
$$
where \( u_d, u_q \) are the d- and q-axis voltages, \( i_d, i_q \) are the d- and q-axis currents, \( L_d, L_q \) are the inductances, \( R_s \) is the stator resistance, \( \psi_f \) is the permanent magnet flux linkage, and \( \omega_e \) is the electrical angular speed. The electromagnetic torque is given by:
$$
T_e = \frac{3}{2} P_n \left[ \psi_f i_q + (L_d – L_q) i_d i_q \right]
$$
where \( P_n \) is the number of pole pairs. This model reveals the levers of control: torque is directly governed by the currents \( i_d \) and \( i_q \).
The operational envelope of the motor is constrained by two fundamental limits: the current limit from the inverter and the voltage limit from the DC bus. These form the current limit circle and voltage limit ellipse in the d-q current plane:
$$
i_d^2 + i_q^2 \leq I_{smax}^2
$$
$$
(L_d i_d + \psi_f)^2 + (L_q i_q)^2 \leq \left( \frac{U_{dc}}{\sqrt{3} \omega_e} \right)^2
$$
where \( I_{smax} \) is the maximum stator current and \( U_{dc} \) is the DC-link voltage. The art of high-performance vector control is to operate optimally within this dynamically changing feasible region across the entire speed range.
| Control Phase | Primary Objective | Dominant Constraint | Key Characteristic |
|---|---|---|---|
| Maximum Torque Per Ampere (MTPA) | Minimize copper loss for a given torque. | Current Limit | High efficiency at low-medium speed, constant torque region. |
| Flux Weakening (FW) | Extend speed beyond base speed. | Voltage Limit | Constant power region, torque reduces with speed. |
| Maximum Torque Per Voltage (MTPV) | Maximize torque output at very high speeds. | Voltage Limit | Optimal use of inverter voltage capability. |
My simulation models, built in MATLAB/Simulink, implement these strategies. For MTPA control, the optimal current pair (\(i_d^*, i_q^*\)) that minimizes current magnitude for a requested torque \(T_e^*\) is found by solving the Lagrange multiplier problem. Constructing the auxiliary function:
$$
F = \sqrt{i_d^2 + i_q^2} + \lambda \left( T_e^* – \frac{3}{2}P_n \left[ \psi_f i_q + (L_d – L_q)i_d i_q \right] \right)
$$
and setting the partial derivatives to zero leads to the optimal condition. For a motor with salient poles (\(L_d \neq L_q\)), this results in a specific relationship between \(i_d\) and \(i_q\). Similarly, in the deep flux-weakening region, MTPV control is employed to extract the last bit of torque capability by solving another constrained optimization problem on the voltage limit ellipse.
The superiority of the electric drive system becomes vividly apparent when examining its output characteristics. A key metric for vehicle performance is the tractive effort versus speed curve. An ideal drive would provide high torque at low speed for acceleration and hill-climbing, and then transition to a wide constant-power region at higher speeds for efficient cruising and high-speed passing maneuvers.
- Traditional ICE Powertrain: The ICE has a narrow peak torque and power band. To approximate a usable tractive effort curve, it requires a complex multi-gear transmission (often 8-10 speeds), a clutch, and a torque converter. This introduces mechanical complexity, control latency, shift shocks, and energy losses.
- Electric Drive System with PMSM: As my simulations confirm, a properly controlled PMSM naturally delivers this ideal characteristic. From standstill up to base speed, it operates in the constant-torque (MTPA) region, delivering maximum acceleration. Beyond base speed, the flux-weakening control seamlessly transitions the operation into a wide constant-power region. Critically, this is achieved with a single fixed-ratio gear reduction. The elimination of the multi-speed transmission is a monumental advantage for AVs: it simplifies the powertrain, reduces weight and cost, improves reliability, and, most importantly, removes a major source of nonlinearity and discontinuity from the vehicle’s longitudinal dynamics.
The implications for autonomous driving control are profound. The vehicle motion controller, responsible for tracking a desired speed or acceleration profile, requires a predictable, fast, and linear-ish actuator. The electric drive system is precisely that. Its torque response time can be on the order of milliseconds, orders of magnitude faster than an ICE’s several-hundred-millisecond response. This allows for very tight and smooth closed-loop control of driving force. For example, in adaptive cruise control or stop-and-go traffic, the electric drive system can make minute and rapid adjustments to maintain a precise gap, improving safety and ride comfort. In path-following scenarios requiring coordinated longitudinal and lateral control, the rapid torque vectoring capabilities (in systems with multiple motors) can be directly exploited for stability enhancement.
| Feature | Traditional ICE Powertrain | Electric Drive System (PMSM-based) | Benefit for Autonomous Driving |
|---|---|---|---|
| Torque Response | ~100-500 ms (throttle, turbo lag) | < 10 ms (current-based control) | Enables high-bandwidth, precise motion control. |
| Power & Torque Curve | Peaky, requires multi-gear transmission | Wide constant torque & power region, single-speed gearbox | Simplifies vehicle model, smoother acceleration profile. |
| Actuator Linearity | Non-linear (throttle mapping, clutch engagement) | Highly linear (torque command to torque output) | Simplifies control design and calibration. |
| Energy for Autonomy Suite | Strains 12V system, requires DC-DC converter | Integrates natively with high-voltage bus | Robust and ample power for sensors/computers. |
| Packaging | Bulky engine, transmission, driveshaft | Compact motor, flat battery pack | Frees up space for AV hardware and passenger comfort. |
Implementing such high-performance control in an electric drive system is not without its challenges, which form a key part of my research focus. The cross-coupling terms (\( -\omega_e L_q i_q \) and \( \omega_e L_d i_d \)) in the voltage equations become significant at high speeds, particularly in the flux-weakening region. If not properly compensated, they degrade the current loop’s tracking performance, leading to torque ripple and reduced efficiency. In my models, I implement a feedforward decoupling compensation. The voltage commands are modified as:
$$
u_d^* = u_{d,PI} – \omega_e L_q i_q
$$
$$
u_q^* = u_{q,PI} + \omega_e (L_d i_d + \psi_f)
$$
where \( u_{d,PI} \) and \( u_{q,PI} \) are the outputs of the PI current controllers. This effectively linearizes the plant, allowing the simple PI controllers to achieve excellent performance across the speed range. This level of dynamic compensation is straightforward in the software-defined environment of an electric drive system but is physically impossible in a conventional powertrain.
Furthermore, the integration of the electric drive system with the broader autonomous driving stack opens new optimization avenues. For instance, predictive energy management can use map and traffic data from the AV’s planner to pre-condition the battery and optimize torque distribution for maximum range. The regenerative braking capability of the electric drive system can be seamlessly blended with friction braking by the motion controller to achieve smooth deceleration while recuperating energy, a process far smoother than what can be achieved with traditional ESP/ABS systems interacting with engine braking.
Looking forward, the evolution of the electric drive system will continue to amplify its benefits for autonomy. The trend towards higher switching frequencies in inverters, the use of wide-bandgap semiconductors (SiC, GaN), and the development of more advanced motor topologies (like the axial flux motor) promise even higher power density, efficiency, and bandwidth. The concept of the “e-corner” or wheel-hub motor, while challenging from an unsprung mass perspective, offers the ultimate in control granularity through individual wheel torque control, a powerful tool for vehicle stability control in extreme AV maneuvers.
In conclusion, the technical synergy between the electric drive system and autonomous driving is undeniable and profound. Through detailed mathematical modeling and simulation of control strategies like MTPA, Flux Weakening, and MTPV, we can rigorously demonstrate the electric drive system‘s superior performance characteristics: millisecond-level torque response, a naturally wide speed range without complex gearing, and high-fidelity controllability. These traits directly address the core needs of an autonomous vehicle’s motion control layer—precision, speed, and predictability. While challenges in integration, thermal management, and cost persist, the foundational advantages make the electric drive system the unequivocal powertrain of choice for the autonomous future. It transforms the vehicle from a mechanically-driven machine into a digitally-controlled entity, perfectly aligning with the paradigm of software-defined automation.